허 건 수교수
Machine Monitoring and Control Labortory
02.2220.0437
khuh2@hanyang.ac.kr
mmc.hanyang.ac.kr
경력
- LG전자 중앙연구소
- Univ. of Michigan IVHS Program research fellow
- 한양대학교 미래자동차공학과 교수
담당과목
- 생산공학
- 차량동역학 및 제어
- 차량동역학 시스템
- 자동차공학 실험
- 시스템해석
- 적응제어 이론 및 응용
연구관심분야
- 무인 자율 주행 자동차 제어
- 센서기반 차량제어시스템
- 센서 및 통신기반 주변차량 감지
- 차량 상태 감지 및 모니터링 시스템
주요상훈
- 2013한양대학교 저명강의교수 선정
- 2012한국자동차공학회 학술상
연구실소개
보유장비
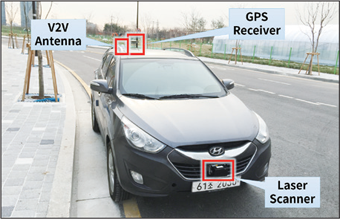
- 실험용 차량(Tucson)
- MATLAB/Simulink, CarSim, PreScan
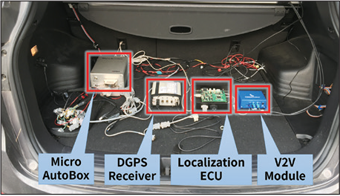
- MicroAutoBox, PXI, Laser Scanner, 레이다
- Brake/Steer HILS
- Vector CANoe
연구실 특징
- 차세대 차량을 위한 제어 시스템 개발에 관한 연구 수행
- 차세대 차량에 적용하기 위한 차량 상태 감지에 관한 연구 수행
- 무인 자율 주행 자동차 제어에 관연 연구 수행
주요연구논문
- Modeling and control of an electronic wedge brake, Proc. IMechE. Part C: J. Mechanical Engineering Science
- Collision detection system design using a multilayer laser scanner for collision mitigation, Proc. IMechE. Part D: J. Automobile Engineering
- Monitoring system design for lateral vehicle motion, IEEE Trans. Veh. Technol.
주요 특허
- 차량의 질량 추정 방법
- 브레이크 응답성능을 고려한 차량 제동 제어 시스템 및 제어 방법
- 제동 거리 기반의 충돌 경고 시스템 및 방법 외 다수
주요연구프로젝트
주요연구
-
V2V 기반 주변 차량인지 로직 개발
- 차량간 통신(V2V Communication)을 이용하여 주변 차량 인지 및 현재 주행중인 차선을 검출하는 로직 개발
-
ADAS(AEBS)개발
- 센서(레이다, 비젼 센서 등)을 이용하여 전방 차량과의 충돌 위험성을 운전자에게 경고하고 유사시 자동으로 제동하는 시스템 개발
-
도로정보 기반의 차량 제어 지원기술 개발
- V2X 통신으로부터 받은 정보와 자차량의 정보를 이용하여 차량을 제어할 수 있는 시스템 개발
-
도로 등판각 추정 시스템 개발
- 차량에 장착된 센서들의 신호를 이용하여 현재 차량이 주행하고 있는 도로의 경사각을 추정하는 시스템 개발