경력
- 2024 ~ 현재한양대학교 미래자동차공학과 부교수
- 2018 ~ 2024건국대학교 스마트운행체공학과 부교수
- 2015 ~ 2018Expert system engineer, Valeo, France
- 2014 ~ 2015한양대학교 자동차전자제어연구소 박사후연구원
연구관심분야
- (Decision) 동적 상황 내 자율주행을 위한 협조 판단, 예측 및 제어
- (Machine learning) 실시간 환경 모델 생성, 객체 검출, 분류 및 추적
- (Perception) LiDAR, Radar, GNSS, INS등 다중 센서 퓨전, 실시간 위치 추정, 정밀 지도 생성 및 업데이트, 객체 추적
- (Platform) 디지털트윈, 컴퓨팅, 네트워크 및 소프트웨어 시스템 설계
연구실소개
보유장비
- 전기차 기반 자율주행 실험차량 (IONIQ5) 2대
- 자율주행실험 관련장비: GNSS(10), GNSS-INS(3), 3D LiDAR(8), Camera(20)
- 학습용 워크스테이션 다수 (NVIDIA RTX-3090ti / NVIDIA RTX-4090 / NVIDIA A6000 등 고성능 GPU 다수 보유)
- 임베디드 PC 다수 (NVIDIA Jetson Orin / NVIDIA Jetson Xavier)
연구실 특징
- Perception: 실시간 환경 및 객체 인지, 실시간 위치 추정, 정밀 지도 SLAM 및 업데이트 연구
- Decision: 동적 상황에서의 자율주행 모빌리티 협조 판단, 예측 및 제어 연구
- Machine learning: 인지-판단-제어에 필요한 기계학습 기술 연구
- Platform: 스마트 모빌리티에 필요한 디지털트윈, 컴퓨팅, 네트워크 및 소프트웨어 시스템 설계
주요연구논문
- AutoKU: An Autonomous Driving System Design for the World's First Mass-Produced Vehicle in Multi-Vehicle Racing Environment. IEEE Intelligent Vehicles Symposium, 2024
- Collision Probability Field based Interaction-aware Longitudinal Motion Prediction. IEEE Transactions on Intelligent Transportation Systems, 2024
- PCSCNet: Fast 3D semantic segmentation of LiDAR point cloud for autonomous car using point convolution and sparse convolution network. Expert Systems with Applications, 2023
- Interaction-aware trajectory prediction of surrounding vehicles based on hierarchical framework in highway scenarios. IEEE Intelligent Vehicles Symposium, 2022
- A training dataset for semantic segmentation of urban point cloud map for intelligent vehicles. ISPRS Journal of Photogrammetry and Remote Sensing, 2022
- Road shape classification-based matching between lane detection and HD map for robust localization of autonomous cars. IEEE Transactions on Intelligent Vehicles, 2022
주요 특허
- Method for localizing and enhancing a digital map by a motor vehicle; localization device (2023)
- 운전 성향 기반의 주행 제어 시스템, 장치 및 방법 (2023)
- 시맨틱 정보를 활용한 객체 분류 장치 및 방법 (2023)
- 센서 데이터에 대한 융합 장치 및 방법 (2023)
- 클러스터링을 활용한 인공지능 기반 객체 검출 장치 및 방법 (2023)
- 최신화 정도 및 일치 정도를 고려한 정밀지도 관리 장치 및 방법 (2022)
- 크라우드 소싱 기반의 정밀지도 업데이트를 위한 전역 경로 생성 장치 및 방법 (2022)
- 정밀지도 생성 지역 결정 방법 및 장치(2019)
- 경로 선택에 기반한 자율 주행 방법 및 장치 (2018)
주요연구프로젝트
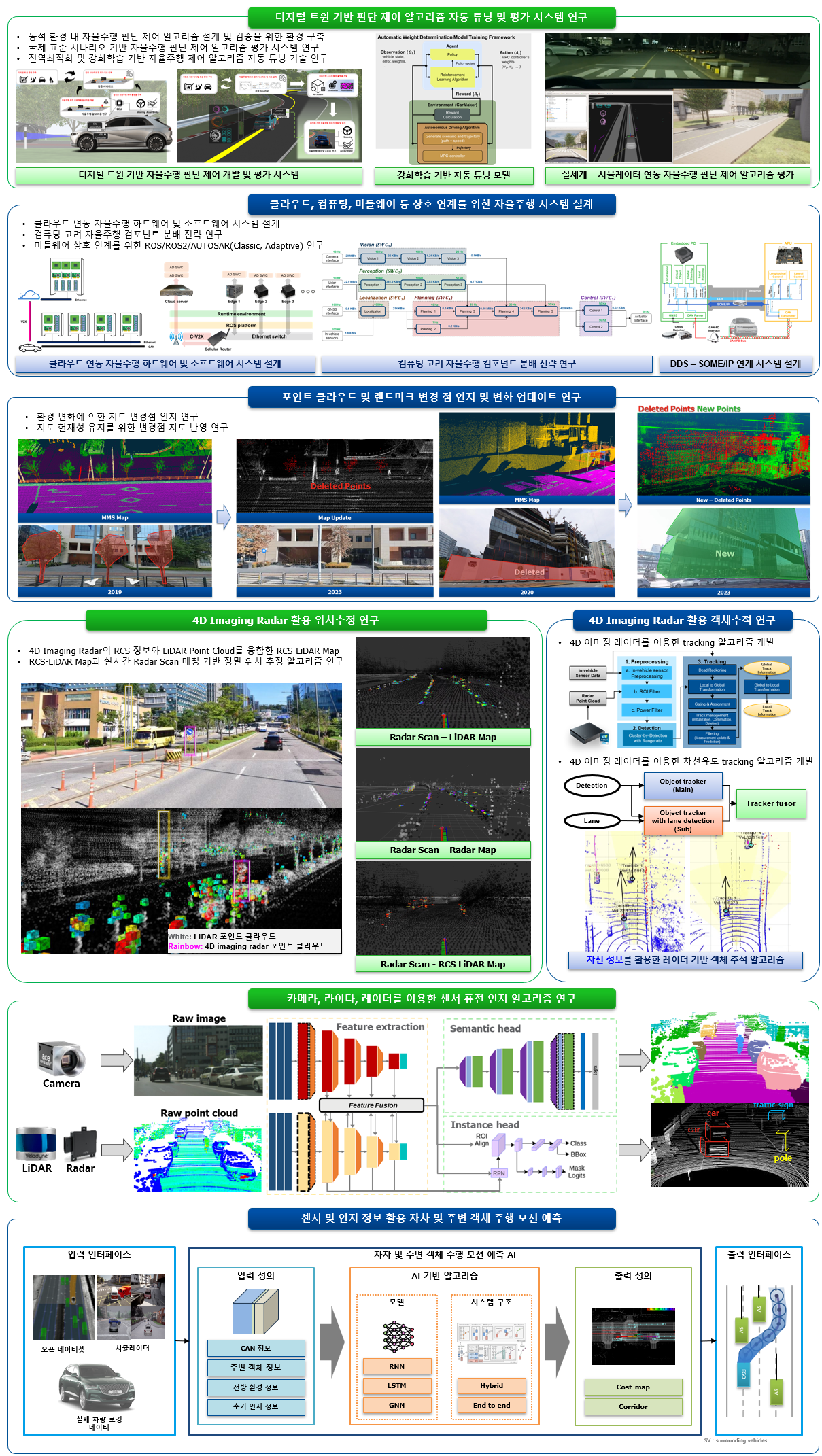
주요연구
-
(Perception) 포인트 클라우드(라이다, 레이더, 카메라 등) 기반 SLAM 및 객체 추적
- 포인트 클라우드 및 랜드마크 지도 생성을 위한 Landmark Graph SLAM 알고리즘
- 포인트 클라우드 및 랜드마크 변경 점 인지 및 변화 업데이트
- 4D 이미징 레이더를 이용한 객체 추적 및 위치추정
-
(Decision) 동적 상황 내 자율주행 판단 및 제어 알고리즘 개발 및 검증
- 동적 상황 고려 자율주행 예측, 판단, 제어 알고리즘 연구
- 자율주행 판단 제어 시스템 검증 기술 연구
- 디지털 트윈 기반 판단 제어 파라미터 추정 및 평가 시스템 연구
- 클라우드, 컴퓨팅, 미들웨어 등 상호 연계를 위한 자율주행 시스템 설계
-
(Machine Learning) 머신러닝 기반 주변환경 인지 및 주행 예측
- 카메라, 라이다, 레이더를 이용한 센서 퓨전 인지 알고리즘 연구
- 센서 및 인지 정보 활용 자차 및 주변 객체 주행 모션 예측
- 자율주행 고장 인지 알고리즘 연구