경력
- 1994 ~ 현재한양대 교수
- 1992 ~ 1994MIT 정보기계센터 연구원
연구실소개
보유장비
- 6축다관절로봇
- 2축리니어모터 스테이지
- 레이저근접센서
연구실 특징
- 뉴로/퍼지, 진화알고리듬을 이용한 지능제어 및 최적화 기법 연구
- 제어기술과 최적화기술을 로봇공학과 차량제어에 응용
- 자율주행을 위한 센서융합과 환경인식 기술을 이동로봇과 자율주행차량에 적용
주요연구논문
- Model Based Optimization of Supervisory Control Parameters for Hybrid Electric Vehicles
- Real-Time Bilateral Control for an Internet-Based Teleoperation System
- LOCATION ESTIMATION OF MOBILE SYSTEMS USING PASSIVE RFID TAGS IN AN INDOOR ENVIRONMENT
주요연구프로젝트
주요연구
-
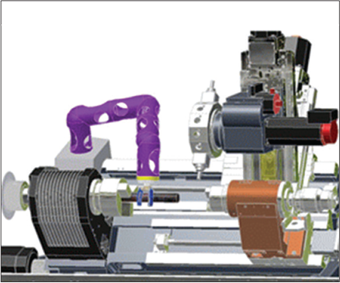
고효율 생산시스템을 위한 다관절 로봇개발
- 7자유도 로봇의 기구학 해석 및 제어
- 충돌 회피 및 최적 경로 발생
- 로봇/공작기계 및 복수 로봇팔의 협력 방안
-
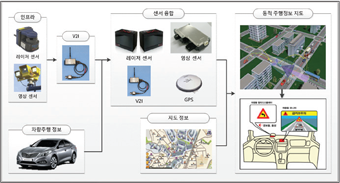
자율주행을 위한 센서융합을 통한 환경인식
- 센서 정보 취합 (영상, GPS, 레이저, 레이다)
- 정보 융합 및 판단
- 동적지도 작성
- 운전자 경고 발생 및 능동제어 기법
-
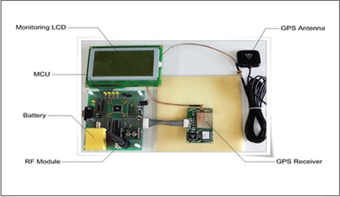
이동로봇의 항법 연구
- RFID를 이용한 위치 추정
- 최적 경로 발생
- 장애물 회피 및 실내 지도 작성